Tổng Hợp Câu Hỏi Ôn Tập Lý Thuyết Điều Khiển Tự Động P1 EPU Tham khảo ngay bộ câu hỏi ôn tập Lý Thuyết Điều Khiển Tự Động Phần 1 từ Đại học Điện Lực (EPU), miễn phí và có kèm đáp án chi tiết. Tài liệu này bao gồm các câu hỏi được biên soạn bám sát chương trình học, giúp sinh viên dễ dàng ôn luyện và củng cố kiến thức về lý thuyết điều khiển tự động. Đây là nguồn tài liệu hữu ích để chuẩn bị cho các kỳ thi giữa kỳ và cuối kỳ, hỗ trợ quá trình học tập một cách hiệu quả.
Từ khoá: Câu hỏi ôn tập Lý Thuyết Điều Khiển Tự Động 1 Đại học Điện Lực EPU miễn phí có đáp án ôn tập Điều Khiển Tự Động kiểm tra giữa kỳ kiểm tra cuối kỳ tài liệu học Điều Khiển Tự Động đề thi Điều Khiển Tự Động luyện thi Điều Khiển Tự Động Đại học Điện Lực EPU
Mã đề 1 Mã đề 2 Mã đề 3 Mã đề 4 Mã đề 5 Mã đề 6
Bạn chưa làm Mã đề 1!
Bắt đầu làm Mã đề 1
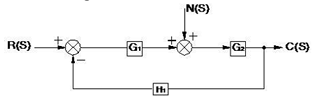
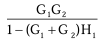
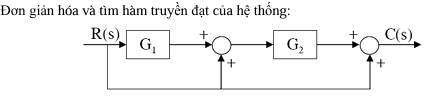
Câu 1: Hàm truyền của hệ thống ở hình sau khi N(s)=0 là :
Câu 2: Các phần tử ở hàng 2 của bảng Routh được lập từ:
A. Các hệ số có chỉ số lẻ.
B. Các hệ số có chỉ số chẵn.
C. Các hệ số có chỉ số tăng dần.
D. Các hệ số có chỉ số giảm dần.
Câu 3: D. .
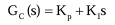
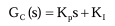
Câu 4: Hàm truyền của hiệu chỉnh tích phân tỉ lệ PI (proportional integral) liên tục có dạng:
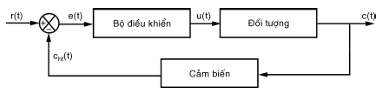
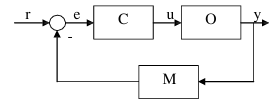
Câu 5: Cho sơ đồ khối hệ thống điều khiển như hình vẽ, các phát biểu sau, phát biểu nào đúng:
A. Hệ thống trên là hệ thống điều khiển tuyến tính
B. Hệ thống trên là hệ thống điều khiển vòng hở
C. Hệ thống trên là hệ thống điều khiển hồi tiếp
D. Hệ thống trên là hệ thống điều khiển số
Câu 6: Theo tiêu chuẩn Nyquist nếu hệ hở ổn định hay ở biên giới ổn định là đặc tính tần số biên pha của hệ hở có quan hệ như thế nào với điểm (-1, j0)?
D. Không có quan hệ gì
Câu 7: Tiêu chuẩn ổn định Bode cho hệ thống hồi tiếp âm đơn vị:
A. Hệ thống kín Gk(s) ổn định nếu hệ thống hở G(s) có độ dự trữ biên âm và độ dự trữ pha dương.
B. Hệ thống kín Gk(s) ổn định nếu hệ thống hở G(s) có độ dự trữ biên và độ dự trữ pha âm.
C. Hệ thống kín Gk(s) ổn định nếu hệ thống hở G(s) có độ dự trữ biên dương và độ dự trữ pha âm.
D. Hệ thống kín Gk(s) ổn định nếu hệ thống hở G(s) có độ dự trữ biên và độ dự trữ pha dương.
Câu 8: Sai số xác lập của hệ thống có hàm truyền đạt hở Wh(p)= 1/(p2+p+k) khi tín hiệu vàou(t)=1(t) là?
Câu 10: Hàm truyền đạt của hệ thống song song :
Câu 11: Hàm truyền đạt trong hệ rời rạc là tỷ số giữa tín hiệu ra và tín hiệu vào được biểu diễn trong miền nào?
A. Trong miền Z với điều kiện đầu triệt tiêu
B. Trong miền Laplace rời rạc với điều kiện đầu tiến tới vô cùng
C. Trong miền Laplace rời rạc với điều kiện đầu tiến tới vô cùng
D. Trong miền thời gian
Câu 12: Số lần đổi dấu của số hạng ở cột 1 bảng Routh bằng số nghiệm:
B. Có phần thực dương
C. Nghiệm phức của phương trình
D. Có phần thực bằng 0
Câu 13: Bộ bù trễ pha làm cho hệ thống:
B. Có thời gian đáp ứng quá độ chậm
C. Có thời gian đáp ứng quá độ nhanh
D. Có băng thông tăng
Câu 14: Biểu đồ Nyquist (đường cong Nyquist) là:
A. Đồ thị biểu diễn đặc tính tần số G(jω) trong hệ toạ độ Đề-các khi thay đổi từ 0→∞
B. Đồ thị biểu diễn đặc tính tần số G(jω) trong hệ toạ độ cực khi ω thay đổi từ 0→∞
C. Đồ thị biểu diễn đặc tính tần số G(jω) trong hệ toạ độ cầu khi thay đổi từ 0→∞
D. Đồ thị biểu diễn đặc tính tần số G(jω) trong hê toạ độ trụ khi ω thay đổi từ 0→∞
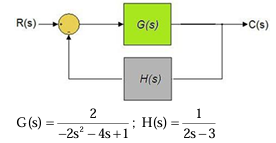
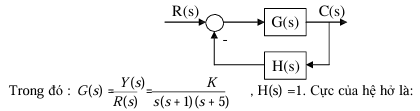
Câu 15: Xét tính ổn định của hệ thống tự động có sơ đồ khối như sau:
A. Hệ thống ở biên giới ổn định
B. Hệ thống không ổn định
C. Hệ thống ổn định
D. Hệ thống có 3 cực
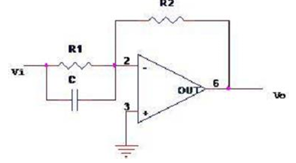
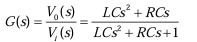
Câu 16: Hàm truyền đạt của mạch điện ở hình sau là:
Câu 18: Điều kiện cần để hệ thống liên tục ổn định theo tiêu chuẩn ổn định đại số là:
A. Tất cả các hệ số của phương trình đặc trưng phải khác không và cùng dấu.
B. Tất cả các hệ số của phương trình đặc trưng phải khác không
C. Tất cả các hệ số của phương trình đặc trưng phải cùng dấu.
D. Tất cả các hệ số của phương trình đặc trưng phải dương
Câu 19: Hệ thống rời rạc là hệ thống mà trong đó:
A. Tín hiệu tại tất cả các điểm trong hệ thống có dạng chuỗi xung
B. Tín hiệu tại một hoặc nhiều điểm trong hệ thống có dạng chuỗi xung
C. Tín hiệu tại tất cả các điểm trong hệ thống là các hàm liên tục theo thời gian
D. Có khâu giữ dữ liệu
Câu 20: Trong định thức Hurwit các số hạng có chỉ số cao hơn n và bé hơn 0 đều ghi?
Câu 21: Biến đổi Laplace của hàm u(t)= kt là?
Câu 22: Sai số xác lập phụ thuộc vào :
A. Cấu trúc và thông số của hệ thống.
B. Thông số của hệ thống và tín hiệu vào
C. Tín hiệu vào và cấu trúc hệ thống
D. Cấu trúc, thông số và tín hiệu vào của hệ thống
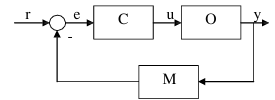
Câu 23: Cho hệ thống điều khiển như hình vẽ, tín hiệu u là:
A. Tín hiệu ngõ ra của hệ thống
B. Tín hiệu điều khiển của hệ thống.
Câu 25: Bộ chuyển đổi A/D
B. Là khâu chuyển đổi tín hiệu tương tự sang tín hiệu số
C. Là khâu giữ dữ liệu
D. Chuyển đổi tín hiệu số sang tín hiệu tương tự
Câu 26: Hệ phi tuyến không ổn định trong:
A. Phạm vi rộng nếu độ lệch ban đầu nhỏ
B. Phạm vi rộng nếu độ lệch ban đầu lớn
C. Phạm vi hẹp nếu độ lệch ban đầu lớn
D. Phạm vi hẹp nếu độ lệch ban đầu nhỏ
Câu 27: Cho biết vị trí cân bằng ở biên giới ổn định trong hình sau:
Câu 28: Tín hiệu ra của bộ chuyển đổi D/A:
A. Tín hiệu liên tục
Câu 29: Tìm số nhánh của qũi đạo nghiệm số của hệ thống hồi tiếp âm đơn vị có hàm truyền hệ hở là:
A. Quĩ đạo nghiệm số có 1 nhánh
B. Quĩ đạo nghiệm số có 2 nhánh
C. Quĩ đạo nghiệm số có 3 nhánh
D. Quĩ đạo nghiệm số có 4 nhánh
Câu 30: Biến đổi Laplace của hàm nấc đơn vị (step) f(t)=1(t):
A. .
D. .
Câu 31: Hệ thống điều khiển là ở biên ổn định nếu:
A. Tất cả các cực của hệ thống có phần thực dương.
B. Có cực có phần thực bằng không, tất cả các cực còn lại có phần thực âm.
C. Có cực có phần thực bằng không, tất cả các cực còn lại có phần thực dương.
D. Có cực có phần thực bằng không, một số cực có phần thực âm.
Câu 32: Hệ thống điều khiển được gọi là ổn định nếu:
A. Tất cả các cực của hệ thống có phần thực dương.
B. Tất cả các cực của hệ thống có phần thực âm.
C. Tất cả các cực của hệ thống âm.
D. Hệ thống có một số cực có phần thực âm.
Câu 33: A. Hệ thống ổn định, có 4 nghiệm nằm bên trái mặt phẳng phức
B. Hệ thống không ổn định, có 3 nghiệm bên phải mặt phẳng phức, 1 nghiệm bên trái mặt phẳng phức
C. Hệ thống không ổn định, có 2 nghiệm bên phải mặt phẳng phức, 2 nghiệm bên trái mặt phẳng phức
D. Hệ thống không ổn định, có 1 nghiệm bên phải mặt phẳng phức, 3 nghiệm bên trái mặt phẳng phức
Câu 34: Đặc tính tần số của hệ thống là:
A. Tỉ số giữa tín hiệu vào xác lập và tín hiệu ra hình sin
B. Là tỉ số giữa tín hiệu vào hình sin và tín hiệu ra xác lập
C. Là tỉ số giữa tín hiệu ra hình sin và tín hiệu vào xác lập
D. Tỉ số giữa tín hiệu ra ở trạng thái xác lập và tín hiệu vào hình sin
Câu 35: Tín hiệu vào của bộ chuyển đổi D/A :
A. Tín hiệu liên tục
Câu 36: Cho hệ thống điều khiển như hình vẽ, phần tử C là:
A. Đối tượng điều khiển.
D. Bộ trừ tín hiệu
Câu 37: Cho hệ thống điều khiển như hình:
C. Hệ hở không có cực
Câu 39: Biểu đồ Bode là hình vẽ gồm các thành phần:
A. Biểu đồ Bode về biên độ
B. Biểu đồ Bode về pha
C. Biểu đồ Bode về biên độ và biểu đồ Bode về pha
D. Vòng tròn đơn vị và trục ảo
Câu 40: Khâu hiệu chỉnh sớm trễ pha gồm:
A. Một khâu trễ pha mắc nối tiếp với một khâu sớm pha
B. Một khâu trễ pha mắc song song với một khâu sớm pha
C. Một khâu trễ pha mắc hồi tiếp với một khâu sớm pha
D. Một khâu trễ pha mắc hỗn hợp với hai khâu sớm pha
 .
. .
. .
. .
.
 .
. .
. .
. .
. .
.


 .
. .
. .
. .
.
 .
. .
. .
. .
.
 .
. .
. .
. .
.


 .
. .
. .
. .
.
 .
. .
.



 A
A B
B C
C D
D