
Đề thi Trắc nghiệm Robot Công nghiệp D11-CODT EPU có đáp án
<p>Đề thi trắc nghiệm Robot Công nghiệp D11-CODT miễn phí của Đại học Điện lực (EPU), kèm theo đáp án chi tiết. Đề thi bao gồm các câu hỏi về nguyên lý hoạt động, cấu trúc và điều khiển robot trong công nghiệp, giúp sinh viên nắm vững kiến thức và ứng dụng thực tiễn của robot trong sản xuất. Đây là tài liệu lý tưởng cho sinh viên ôn tập và chuẩn bị tốt cho kỳ thi Robot Công nghiệp tại EPU.</p>
Từ khoá: đề thi Robot Công nghiệp EPUtrắc nghiệm Robot Công nghiệp D11 EPUđề thi Robot Công nghiệp miễn phíđề thi Robot Công nghiệp có đáp áncâu hỏi trắc nghiệm Robot Công nghiệpôn tập Robot Công nghiệp D11 EPUkỳ thi Robot Công nghiệp Đại học Điện lựcRobot Công nghiệp cơ bản EPURobot Công nghiệp nâng cao EPUđề thi Robot Công nghiệp đại họcluyện thi Robot Công nghiệp EPUđề thi miễn phí Robot Công nghiệp có đáp án
Số câu hỏi: 194 câuSố mã đề: 4 đềThời gian: 1 giờ
143,898 lượt xem 11,055 lượt làm bài
Xem trước nội dung:
Biến đổi Laplace của xung hàm là?
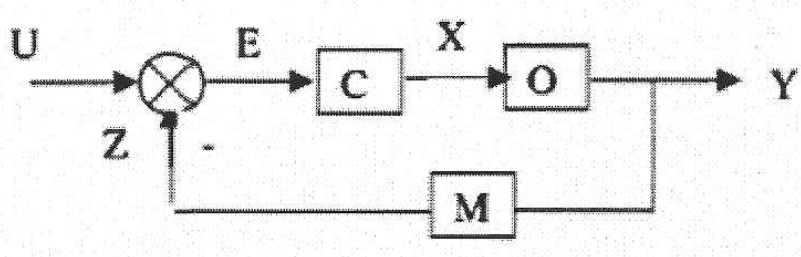
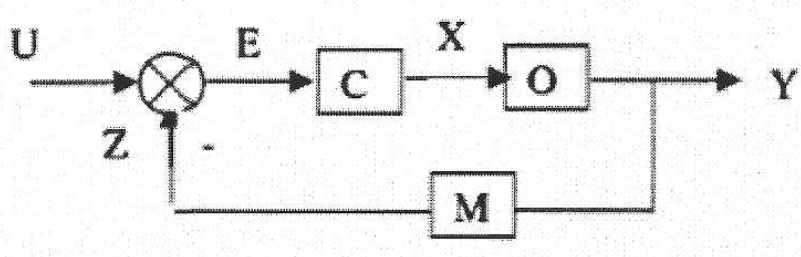
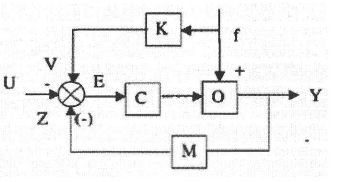
Trong sơ đồ dưới đây M ký hiệu cho?
Trong các một số chương trình điều khiển thao tác robot phép + biểu thị cho phép toán nào?
Biến đổi Laplace của xung bậc thang 1(t) là?
Biến đổi Laplace của xung hàm là?
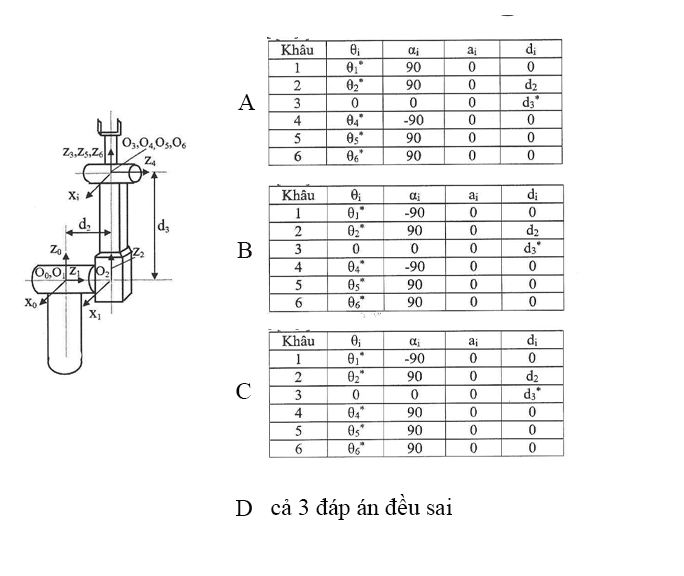
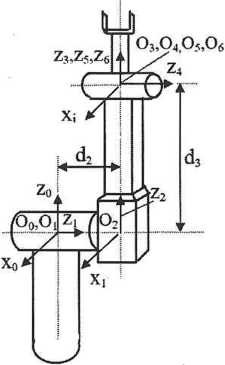
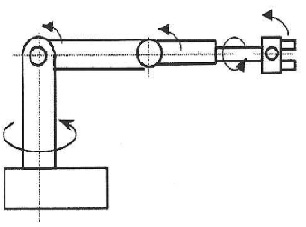
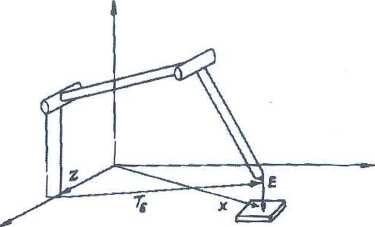
Lập bảng thông số DH của robot Stanford như hình vẽ sau?
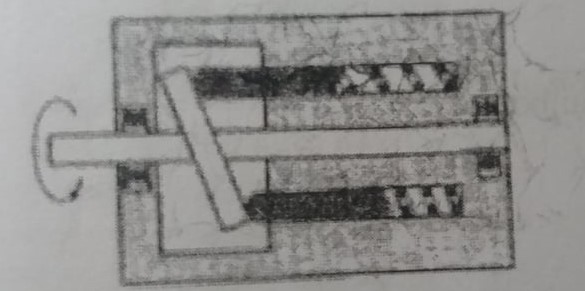
Cho robot Stanford như hình vẽ. Hãy xác định sổ bậc tự do của robot?
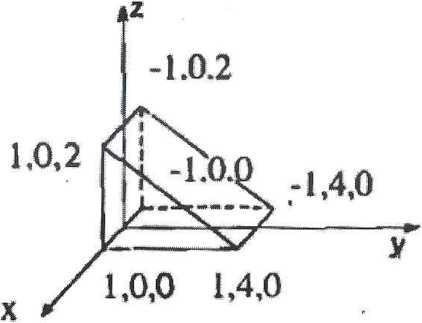
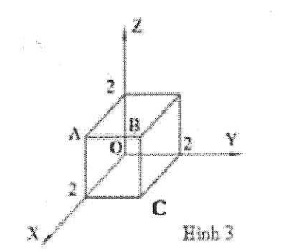
Trong hình vẽ dưới đây vector mô tả tọa độ của điểm ngoài cùng cận phải phía dưới là?
Cho robot như hình vẽ. Hãy xác định số bậc tự do của robot?
Trong sơ đồ dưới đây C ký hiệu cho?
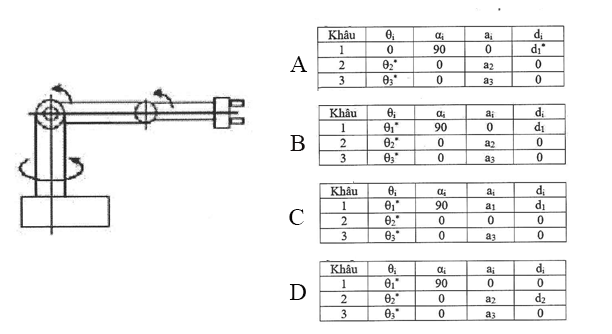
Lập bảng thông số DH của cơ cấu tay máy 3 bậc tự do như hình vẽ sau?
A
B
Trong sơ đồ dưới đây Y ký hiệu cho?

Biến đổi Laplace của xung hàm là?
Biến đổi Laplace của xung hàm là?
Trong ma trận TE của bàn tay máy, ma trận R biểu diễn điều gì?
| Ma trận R | Vector vị trí |
|---|---|
Cho một khối lập phương trong hệ tọa độ OXYZ cố định như hình vẽ. Quay khối lập phương quanh trục ox một góc -45° sau đó tịnh tiến khối lập phương theo vector A = [7 0 4]T. Xác định vector biểu diễn vị trí điểm A (một đỉnh của khối lập phương) sau khi thực hiện 2 phép biến đổi.

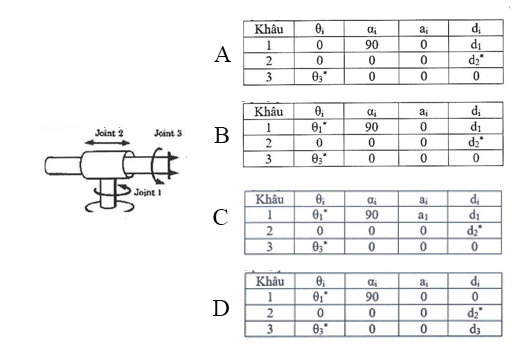
Lập bảng thông số DH của robot 3 bậc tự do như hình vẽ sau?
Trong bộ thông số Denavit–Hartenberg (DH) thì thông số là gì?
Cho một khối lập phương trong hệ tọa độ OXYZ cố định như hình vẽ. Khối này được quay quanh trục OB 1 góc 90°. Xác định vector biểu diễn vị trí điểm A (một đỉnh của khối lập phương) sau khi thực hiện phép quay.
Trong ký hiệu ma trận thì chỉ số dưới để chỉ gì?
Trong sơ đồ dưới đây V ký hiệu cho?
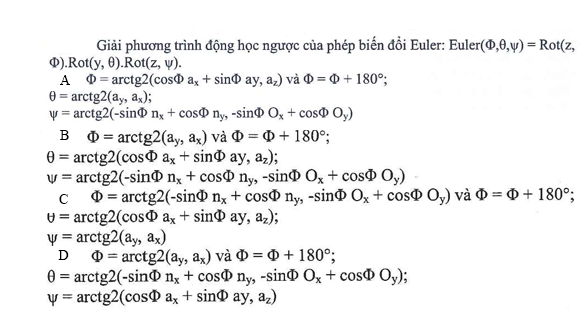
Xác định ma trận X mô tả vị trí và hướng của công cụ tại điểm cuối trong hệ tọa độ chung?
Trong công thức , với , thì ma trận mô tả điều gì?
Trong bộ thông số Denavit–Hartenberg (DH) thì thông số là gì?
Nêu quy tắc bàn tay phải để xác định phương chiều của các hệ tọa độ gắn trên các khâu của robot?
Đề thi tương tự
7 mã đề 331 câu hỏi 1 giờ
87,473 xem6,716 thi
1 mã đề 50 câu hỏi 1 giờ
31,960 xem2,453 thi
1 mã đề 40 câu hỏi 1 giờ
144,979 xem11,146 thi
4 mã đề 181 câu hỏi 1 giờ
145,398 xem11,177 thi
6 mã đề 219 câu hỏi 1 giờ
88,530 xem6,796 thi
4 mã đề 155 câu hỏi 1 giờ
141,152 xem10,848 thi
1 mã đề 21 câu hỏi 40 phút
25,566 xem1,958 thi
3 mã đề 117 câu hỏi 1 giờ
145,869 xem11,213 thi